The materials below relate to an undergraduate dissertation project carried out at the Department of Psychology, The University of Sheffield during the academic year 2023-24. The study informs the dissertations of two students with slightly different research questions, hypotheses, and planned analyses. Note that the hypotheses, sampling procedure, and analysis for this project have been preregistered on the Open Science Framework (OSF; Naneva et al., 2024). APDF document detailing the design of the study can be found at https://osf.io/4c7x9.
The key question this study aimed to answer is whether a propensity to attribute emotions to robots predicts willingness to interact with them. Emotion perception and detection have been of particular interest to human-robot interaction researchers and there is scope to expand knowledge on the extent to which individuals’ tendencies to attribute emotions to robots affect their willingness to interact with novel robots (Stock-Homburg, 2022). The intention of this project is to use the Human-Robot Semantic Priming Task (Spatola & Wudarczyk, 2021) to measure the extent to which participants associate primary (e.g., joy) and secondary (e.g., guilt) emotions with robots. This measure will be used as an estimate for participants’ general propensity for attributing emotion to robots while a self-report measure will be used to assess the extent to which participants are willing to interact with a specific robot (in this case NAO) after a text-based interactive experience with the robot.
Dissertation Students: Isobel Comber and Nathan Cook
Project Supervisor: Dr Stanislava Naneva
Notes
References
Naneva, S., Comber, I., & Cook, N. (2024, February 8). Emotion Attribution, Empathy, and Willingness to Interact with Robots [OSF Preregistration]. https://doi.org/10.17605/OSF.IO/3WXQ7
Spatola, N., & Wudarczyk, O. A. (2021). Ascribing emotions to robots: Explicit and implicit attribution of emotions and perceived robot anthropomorphism. Computers in Human Behavior, 124, 1-10. https://doi.org/10.1016/j.chb.2021.106934
Stock-Homburg, R. (2022). Survey of emotions in human–robot interactions: Perspectives from robotic psychology on 20 years of research. International Journal of Social Robotics, 14(2), 389-411. https://doi.org/10.1007/s12369-021-00778-6
Built with Experiment
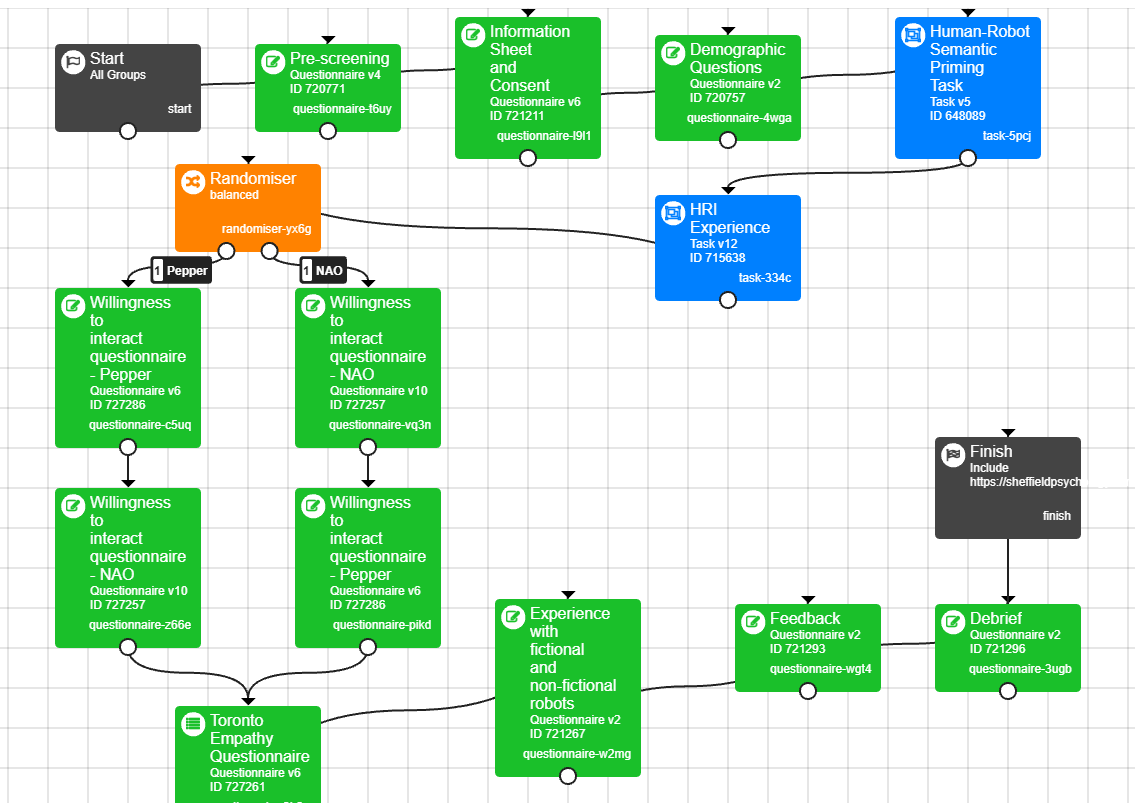
Gorilla Experiment for the Emotion Attribution, Empathy, and Willingness to Interact with Robots undergraduate project.
Gorilla Open Materials Attribution-NonCommerical Research-Only
Built with Questionnaire Builder 2
These questions were used to identify eligible participants for the Emotion Attribution, Empathy, and Willingness to Interact with Robots undergraduate project. Data from these questions was only used to redirect eligible participants to the study.
Pre-screening questions include:
If potential participants answered “No” to questions (1) and (2) or answered "Yes" to questions (3) and (4), they would not have been eligible to take part and would have been taken to a webpage explaining that they do not meet the eligibility criteria.
Gorilla Open Materials Attribution-NonCommerical Research-Only
Built with Questionnaire Builder 2
These questions were used to collect information about the sample in the Emotion Attribution, Empathy, and Willingness to Interact with Robots undergraduate project. Data from this question was not used for analysis.
Questions inlcude:
Gorilla Open Materials Attribution-NonCommerical Research-Only
Built with Task Builder 2
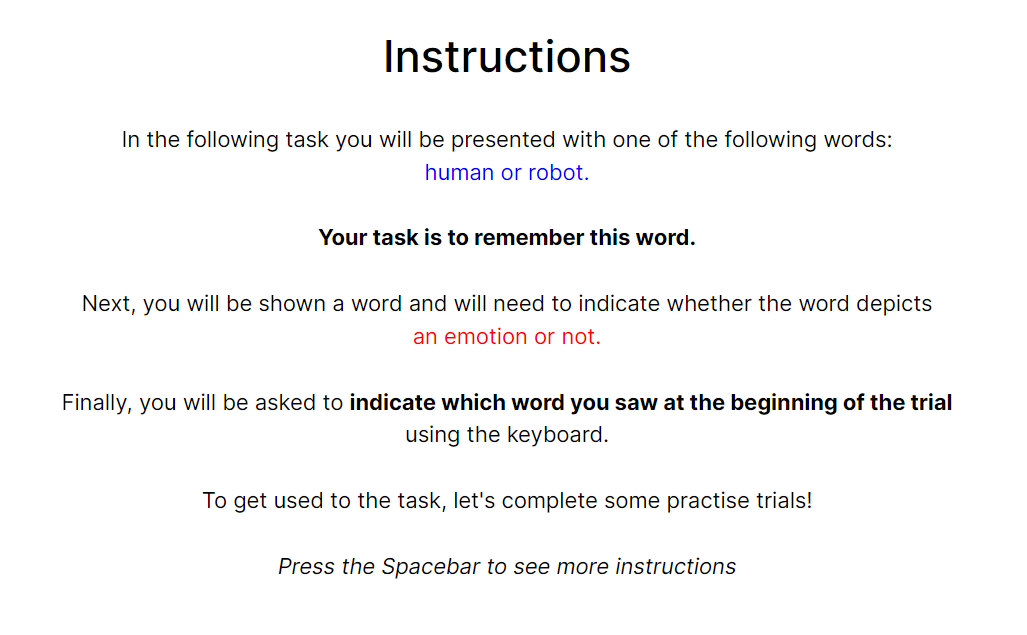
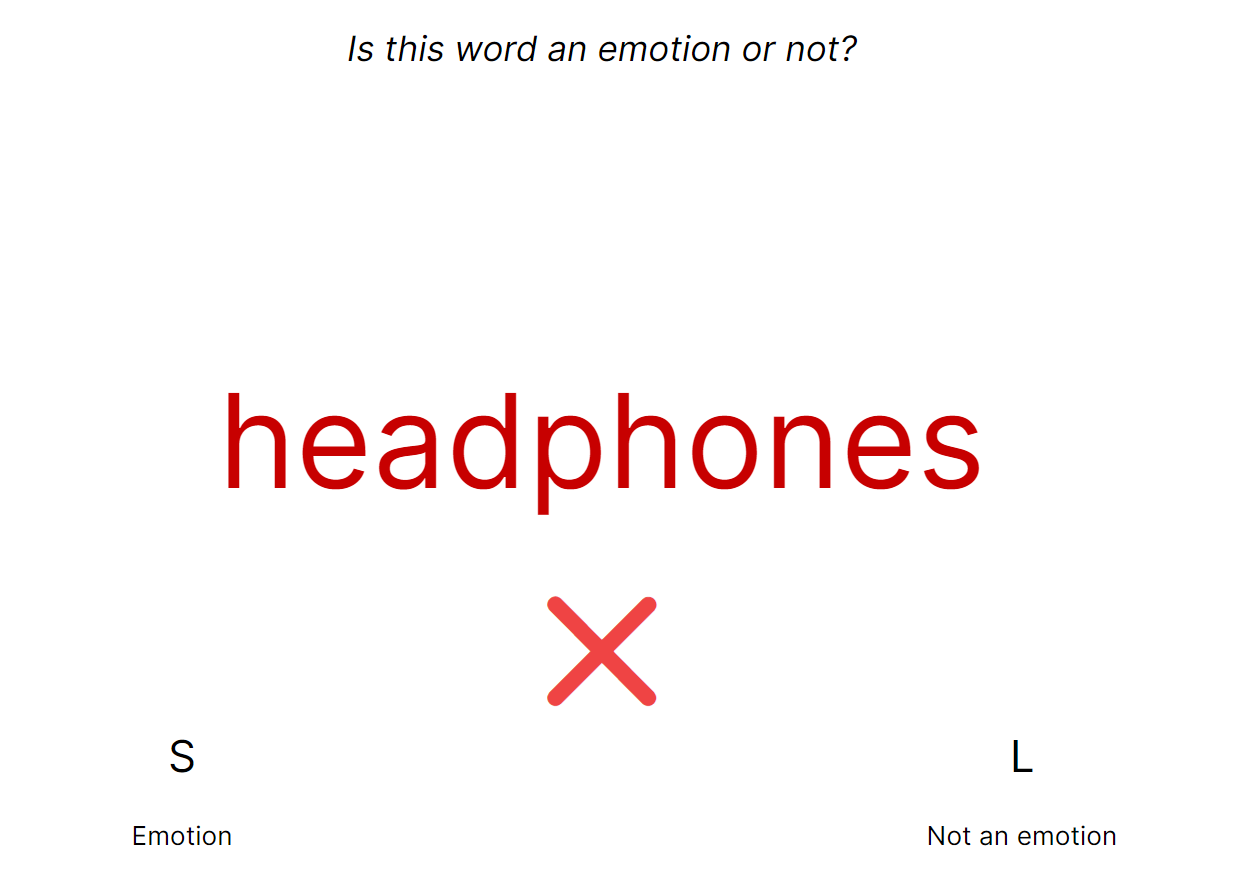
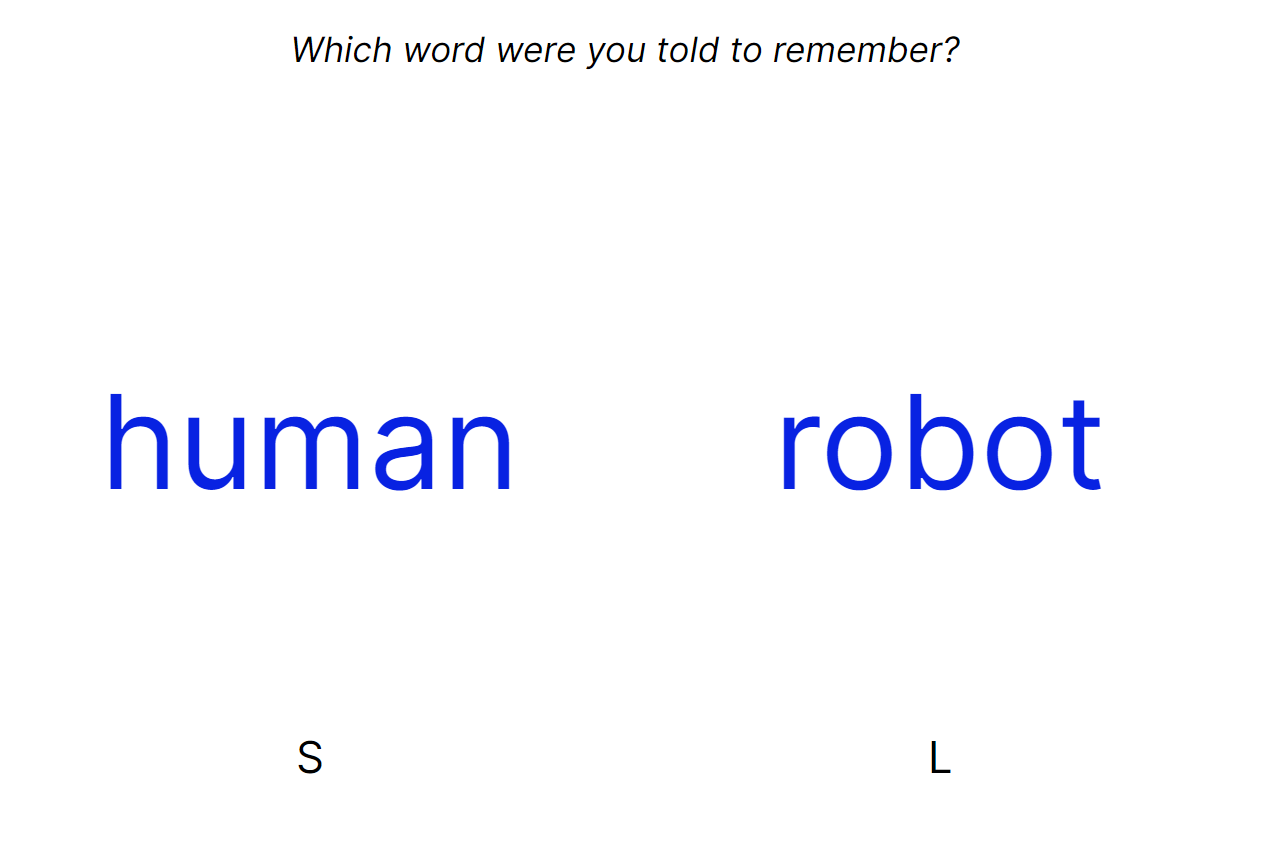
A semantic priming task created by Spatola and Wudarczyk (2021) used in the Emotion Attribution, Empathy, and Willingness to Interact with Robots undergraduate project as a measure of participants' propensity to attribute secondary emotions to robots. This version has been translated from the original French into English and is not necessarily an exact replication of Spatola and Wudarczyk's task. For example, additions such as practice trials and post-response feedback have been included in this version of the task.
In this task, participants had to determine whether a presented word was an emotion (primary or secondary) or a neutral word following a prime (human or robot). The reaction time (RT, ms) it takes participants to determine whether the word is an emotion or not following each prime was be used to determine whether they are more likely to attribute emotions to humans or robots.
For the purposes of the study, only one score was calculated for each participant. This score is referred to as Dsecondary (ms) in the original paper by Spatola and Wudarczyk and is calculated by taking away the RT for secondary emotions following a human prime from the RT for secondary emotions following a robot prime. The Dsecondary scores (ms) was transformed into z-scores with lower values indicating more propensity to attribute secondary emotions to robots. Negative values indicate a propensity for the individual to attribute secondary emotions to robots more so than to humans.
Gorilla Open Materials Attribution-NonCommerical Research-Only
Spatola, N., & Wudarczyk, O. A. (2021). Ascribing emotions to robots: Explicit and implicit attribution of emotions and perceived robot anthropomorphism. Computers in Human Behavior, 124, 1-10.
https://doi.org/10.1016/j.chb.2021.106934
Built with Task Builder 2
A short text-based human-robot interactive experience with the robot NAO that was created specifically for use in the Emotion Attribution, Empathy, and Willingness to Interact with Robots undergraduate project as a substitute for direct human-robot interaction. Note that this activity has not been piloted.
The activity is based on 'choose-your-own-adventure' style books and revolves around the scenario of the robot NAO asking for help to locate a missing playlist called ‘Chill Vibes’. The framework for the scenario was based on output from ChatGPT 4.0 but was manually edited to improve readability and suitability for the study. Participants have the option to respond to NAO in one of three ways during each unique interaction. Responses were coded as either Supportive, Problem-focused, or Dismissive. Each unique interaction was accompanied by an image of NAO that was generated using ChatGPT 4.0 and DALL.E 3.
For the purposes of this study, participants' Supportive, Problem-focused, and Dismissive responses to NAO were counted and ranged between 0 and 5 for each type of response. It should be noted that if the number of responses for a single response type was 5, the number of responses for the other response types was 0.
Gorilla Open Materials Attribution-NonCommerical Research-Only
OpenAI. (2023). ChatGPT (September 25 Version) [Large language model].
https://chat.openai.com
Built with Questionnaire Builder 2
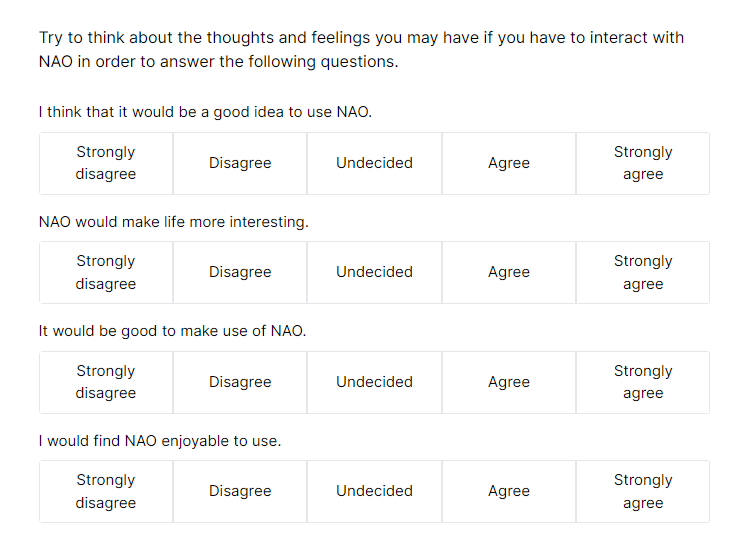
Willingness to interact with the robot NAO is a self-report measure used in the Emotion Attribution, Empathy, and Willingness to Interact with Robots undergraduate project to measure the outcome variable for that particular study.
Eight items were taken from two of the original Almere Model Questionnaire by Heering et al. (2010) subscales: (1) Attitude toward using the robots and (2) Perceived Enjoyment. The adapted questionnaire consists of 8 items on a five-point scale (1 - strongly disagree, 2 – disagree, 3 – undecided, 4 – agree, 5 – strongly agree).
A single summative score was produced for each participant based on all 8 items from the adapted measure such that higher scores indicate more willingness to interact with the robot in real life. Final scores ranged between 8 and 40. One item was reverse-scored.
Gorilla Open Materials Attribution-NonCommerical Research-Only
Heerink, M., Kröse, B., Evers, V., & Wielinga, B. (2010). Assessing acceptance of assistive social agent technology by older adults: the almere model. International Journal of Social Robotics, 2(4), 361-375.
https://doi.org/10.1007/s12369-010-0068-5
Built with Questionnaire Builder 2
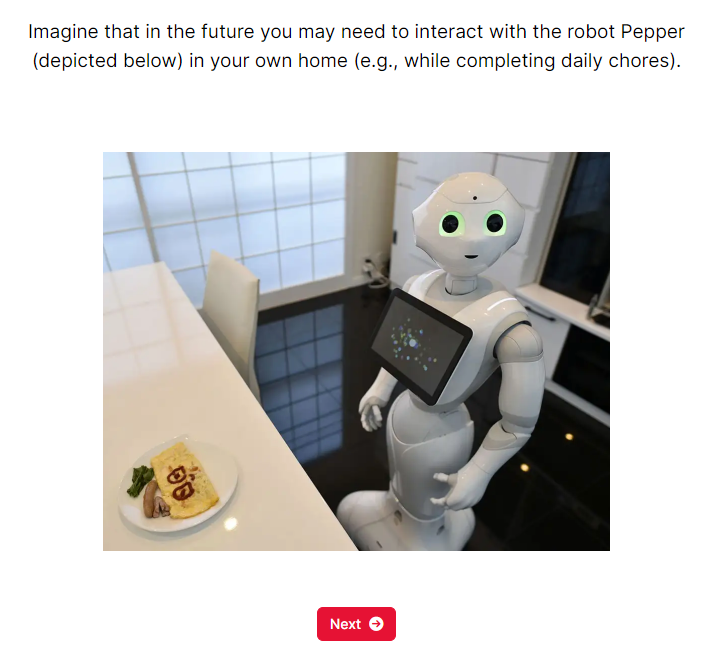
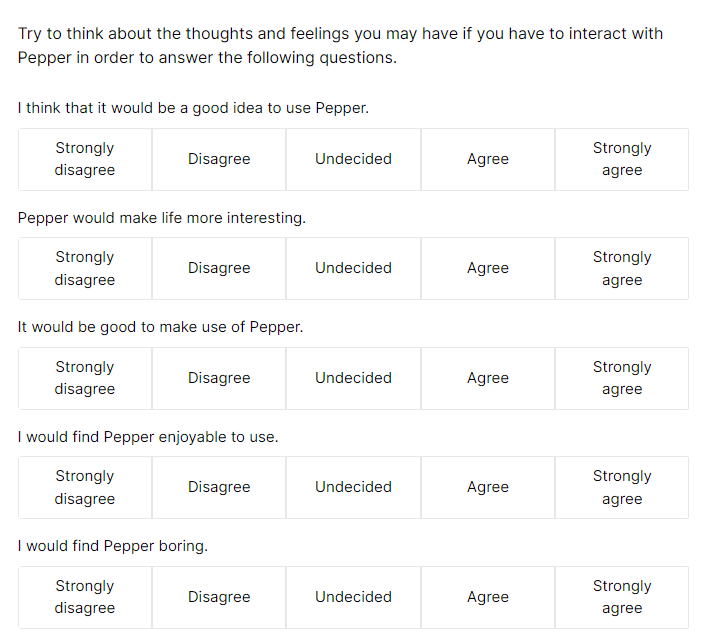
Willingness to interact with the robot Pepper is a self-report measure used in the Emotion Attribution, Empathy, and Willingness to Interact with Robots undergraduate project to as an additional comparable measure for the outcome variable in the study.
Eight items were taken from two of the original Almere Model Questionnaire by Heering et al. (2010) subscales: (1) Attitude toward using the robots and (2) Perceived Enjoyment. The adapted questionnaire consists of 8 items on a five-point scale (1 - strongly disagree, 2 – disagree, 3 – undecided, 4 – agree, 5 – strongly agree).
A single summative score was produced for each participant based on all 8 items from the adapted measure such that higher scores indicate more willingness to interact with the robot in real life. Final scores ranged between 8 and 40. One item was reverse-scored.
Gorilla Open Materials Attribution-NonCommerical Research-Only
Heerink, M., Kröse, B., Evers, V., & Wielinga, B. (2010). Assessing acceptance of assistive social agent technology by older adults: the almere model. International Journal of Social Robotics, 2(4), 361-375.
https://doi.org/10.1007/s12369-010-0068-5
Built with Questionnaire Builder 1
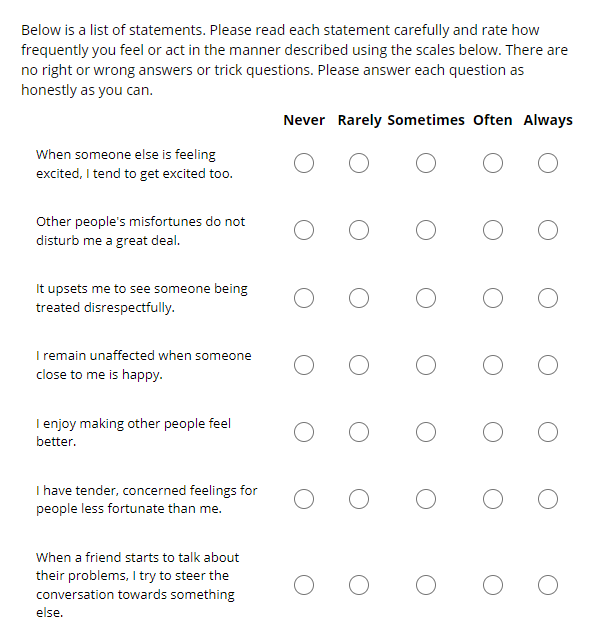
Toronto Empathy Questionnaire (TEQ) is a self-report measure used in the Emotion Attribution, Empathy, and Willingness to Interact with Robots undergraduate project to measure the extent to which individuals are empathetic in general.
This measure was developed by Spreng et al. (2009) and consists of 16 items on a five-point scale (0 - never, 1 – rarely, 2 – sometimes, 3 – often, 4 – always).
For the purposes of this study, a single summative score was produced for each participant based on all 16 items such that higher scores indicate more empathy. Final scores ranged between 0 and 64. Half of the items were reverse-scored.
Gorilla Open Materials Attribution-NonCommerical Research-Only
Spreng, R. N., McKinnon, M. C., Mar, R. A., & Levine, B. (2009). The Toronto Empathy Questionnaire: Scale development and initial validation of a factor-analytic solution to multiple empathy measures. Journal of personality assessment, 91(1), 62-71.
https://doi.org/10.1080/00223890802484381
Built with Questionnaire Builder 2
This is a self-report measure used in the Emotion Attribution, Empathy, and Willingness to Interact with Robots undergraduate project to measure how many robot-related experiences participants had during their lifetime or in the past year on a 10-point scale from 0 experiences to 10 or more experiences.
This measure was adapted from the Robot-related Experiences Questionnaire (MacDorman et al., 2009) by Naneva (2021). For each type of experience with robots, the number of experiences that the participant reported for each item were summed so that the resulting value was between 0 – 20 for indirect experiences with robots, and between 0 – 30 for direct experiences with robots.
Gorilla Open Materials Attribution-NonCommerical Research-Only
MacDorman, K. F., Vasudevan, S. K., & Ho, C. C. (2009). Does Japan really have robot mania? Comparing attitudes by implicit and explicit measures. AI & Society, 23(4), 485-510.
https://doi.org/10.1007/s00146-008-0181-2
Naneva, S. I. (2021). Attitudes toward robots–fiction or reality? [Doctoral dissertation, University of Sheffield].
https://etheses.whiterose.ac.uk/28646/
Built with Questionnaire Builder 2
This was a single open-ended question intended to gather qualitative information about participants responses during the Emotion Attribution, Empathy, and Willingness to Interact with Robots undergraduate project.
The questions is: "Thinking back to the interactive experience with NAO, can you briefly explain why you chose to respond in the way that you did?"
Gorilla Open Materials Attribution-NonCommerical Research-Only
Fully open! Access by URL and searchable from the Open Materials search page